About

Autonomous Driving & Robotics Team Lead
Autonomous Driving | Multimodal Perception | Applied ML Research | Robotics
I lead the dynamic semantic mapping team at Cruise which is part of the end to end driving model to raise accuracy across diverse geolocations. Previously, I steered Lucid Motors' perception roadmap spanning 3D detection, lane understanding, occupancy mapping, and trajectory prediction for autonomous driving. My journey has also included robotics and vision roles at Nourish Technology, Tesla Autopilot
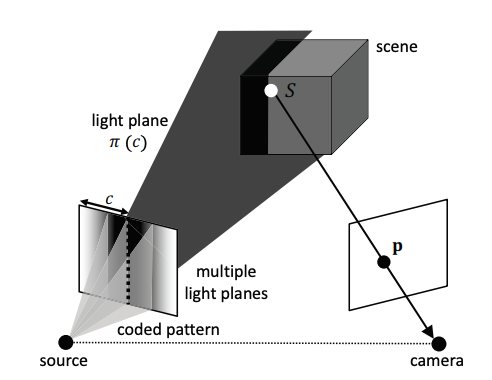
I hold an M.S. in Computer Science (specializing in computer vision) from the University of Wisconsin-Madison and a B.Tech from NIT Calicut. My research explores structured light and autonomous systems.
Resume
Education
Master of Computer Science
2016 - 2018
University of Wisconsin-Madison, Madison, WI
Specialized in computer vision
Bachelor of Technology in Computer Science
2008 - 2012
National Institute of Technology, Calicut, KL, India
Professional Experience
Team Lead, Sr. Applied Research Scientist II
Nov 2023 - Present
Cruise, San Francisco, CA
- Lead a 7-person team delivering dynamic semantic maps with multi-modal BEV prediction for lanes, drivable areas, and traffic infrastructure.
- Fine-tune foundation and multimodal LLMs like GPT-4o to strengthen scene understanding and remote assistance workflows.
- Train visual language models (e.g., LLaVA) for spatial reasoning across multi-camera views.
- Design multi-task detection pipelines that raise small object accuracy by 20% in production evaluations.
Team Lead, Staff Engineer, Perception
Dec 2020 - Oct 2023
Lucid Motors, Newark, CA
- Drove the perception roadmap covering 3D detection, lane understanding, occupancy mapping, and trajectory prediction.
- Built multi-modal BEV occupancy grid segmentation and ground topology pipelines using LiDAR, GPS, and IMU.
- Formulated multi-task learning strategies that combined 3D object and lane detection, boosting monocular 3D accuracy 20x.
- Deployed 3D/2D lane detection and classification for complex topologies using anchored, anchor-free, and ConvLSTM methods.
- Mentored engineers and interns on ML modeling practices and supporting data infrastructure.
Robotics Software Engineer
Dec 2019 - Oct 2020
Nourish Technology, Berkeley, CA
- Modeled coffee shop environments so the robot barista could localize and navigate safely.
- Developed object detection and anomaly monitoring for the gantry robot to flag spills and inconsistencies.
- Prototyped robot arm trajectories within Unity and Gazebo (ROS) to validate operations.
Software Engineer
Jun 2018 - Dec 2019
Bloomberg, New York, NY
- Engineered multi-objective query optimization algorithms for financial analytics tooling.
- Built the quant query parser and computational graph components powering portfolio workflows.
Autopilot Vision Intern
Jun 2017 - Aug 2017
Tesla, Palo Alto, CA
- Prototyped monocular 3D object detection models with Inception and ResNet backbones under Andrej Karpathy.
- Crafted lane segmentation pipelines blending FCNN-based deep learning with CRF refinements.
Founder & CEO
Jul 2014 - Mar 2016
Ontwerp, Bengaluru, India
- Launched customer and merchant Android applications while leading sales and marketing efforts.
- Co-developed the commerce backend on Google App Engine to support growth.
Member of Technical Staff
Jul 2013 - Jun 2014
VMware, Bengaluru, India
Software Engineer
Jun 2012 - Jul 2013
Deloitte, Bengaluru, India
Projects