About

Roboticist/Deep Learning researcher
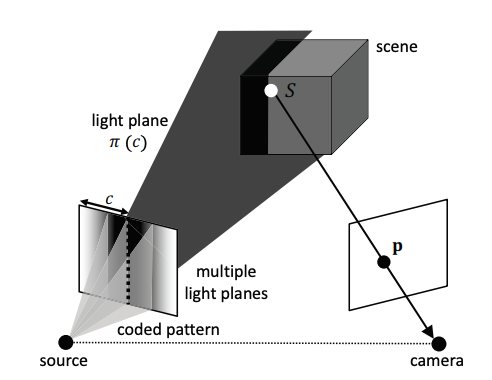
Autonomous Robots | Computer Vision | Deep Learning | Structured Light
I am Machine Learning researcher working on multi-cam multi-task learning models. I am a passionate roboticist on a quest to find newer and better ways to build robots that will help humans automate dangerous, mundane and tedius tasks. I currently work in the autonomous driving perception team at Lucid motors. I have previously worked at Tesla autopilot and a robot barista startup, Nourish.
Resume
Education
Master of Computer Science
2016 - 2018
University of Wisconsin-Madison, Madison, WI
Specialized in computer vision
Bachelor of Technology in Computer Science
2008 - 2012
National Institute of Technology, Calicut, KL, India
Professional Experience
Technical Specialist (Staff Engineer), Perception Algorithms
December 2020 - Present
Lucid Motors, Bay Area, CA
- Project lead: Multi-task learning model framework, 3D lane detection
- Prototyped and deployed various monocular 3D object detection models
- Lane classification for multiple lane detection models
- Multi-agent trajectory prediction using VAE and Transformer architecture
- Tooling: Developed tools for data analysis and metrics
Robotics Software Engineer
December 2019 - October 2020
Nourish Technology, Bay Area, CA
- Object detection/anomaly prediction for gantry robot
- Environment mapping for a robot arm in a distributed robotic system
- Work on a simulator project using Unity/Gazebo (ROS)
Projects